TP系列选型计算指南
TP产品是采用压缩空气驱动的通用转动装置。
弗克自研高性能缓冲器是TP系列的最大优势,吸能效果优异,实现终点位置稳定停止。
选型步骤
一.确定摆动角度,安装方式,摆动时间
-1.1摆动角度θ-:90°/180°
-1.2安装方式-
竖直安装
水平安装
-1.3摆动时间t-

二.计算转动惯量,角加速度
-2.1计算转动惯量-
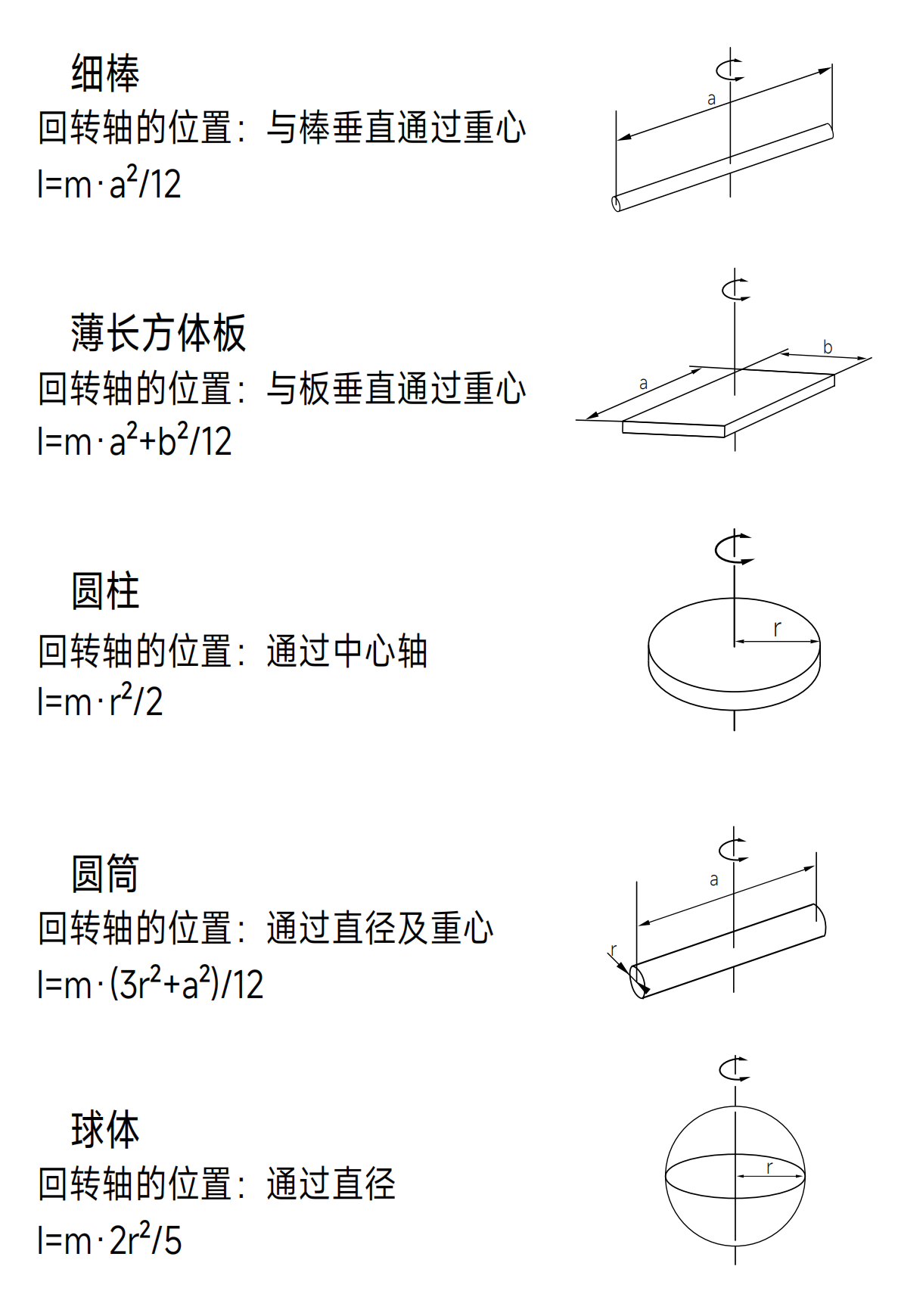
2.1.1常用转动惯量计算公式I
2.1.2平行轴定理
当旋转轴(回转中心线)不通过物体的重心时,计算转动惯量需要考虑重心与旋转轴的偏移距离。此时需使用平行轴定理来修正转动惯量。物体质量为m,绕通过质心的轴的转动惯量为,旋转轴与质心轴之间的垂直距离为L,
例图:
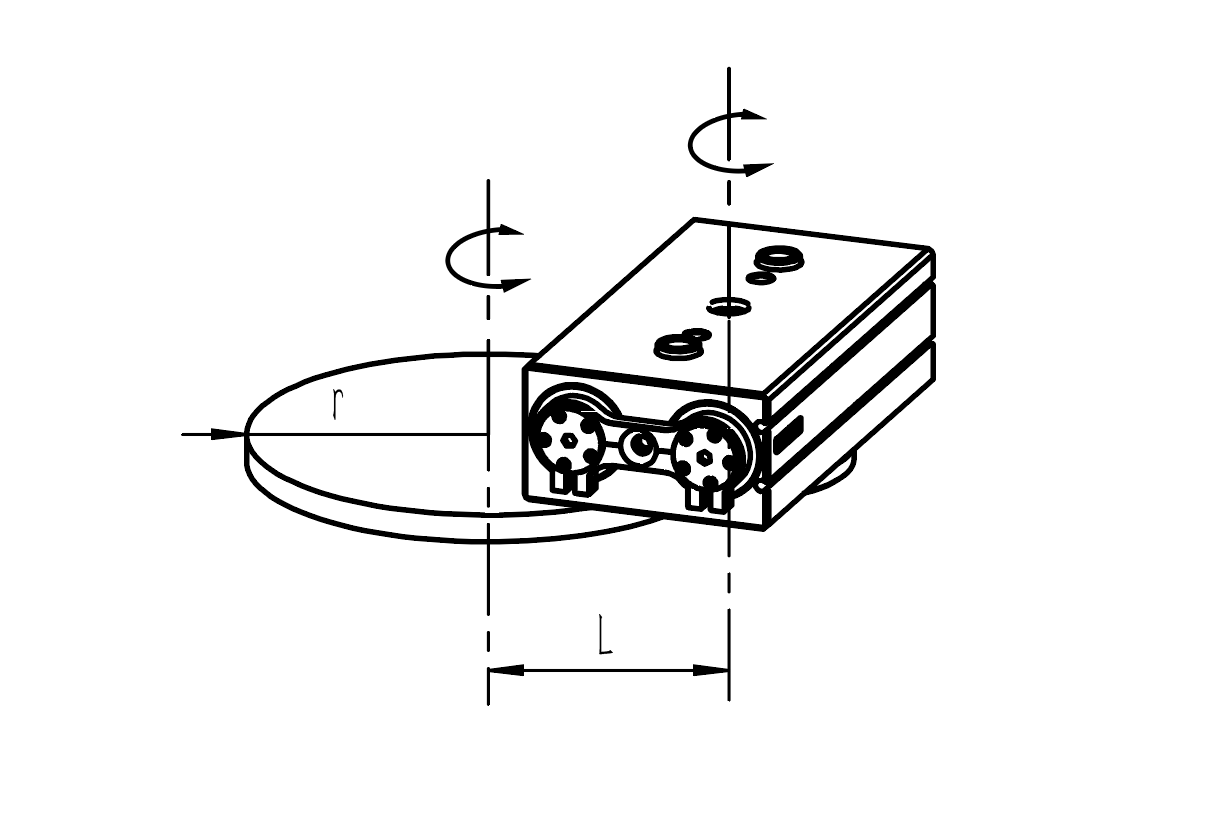
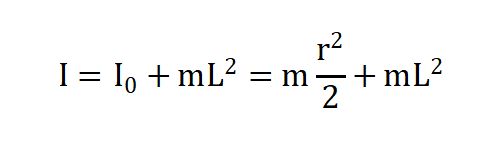
则绕任意平行轴的转动惯量为:
I=I₀+mL²
示例:
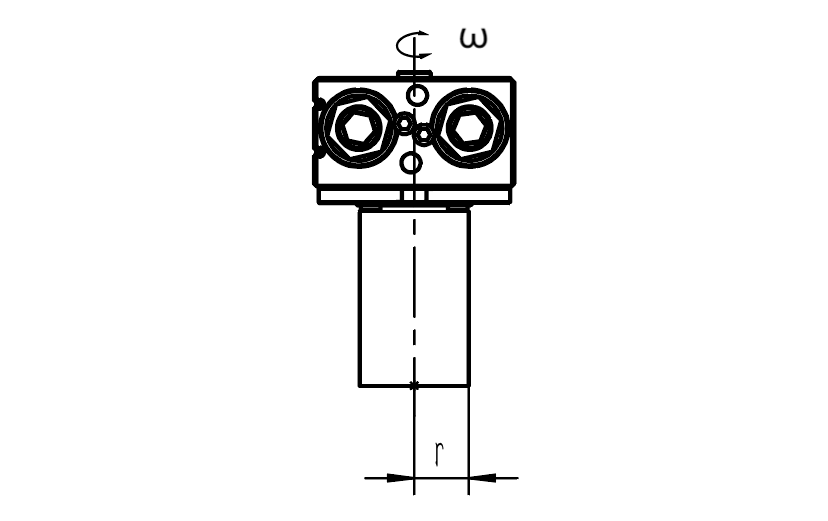
若负载为圆柱时,r为圆柱半径,将负载的重心作为临时回转轴求出I:
2.1.3组合负载场景
当负载由多个物体组合在一起时,实际的转动惯量等于多个组成部分的转动惯量按照一定的规则叠加,并考虑它们的相对位置和旋转轴。
例图:
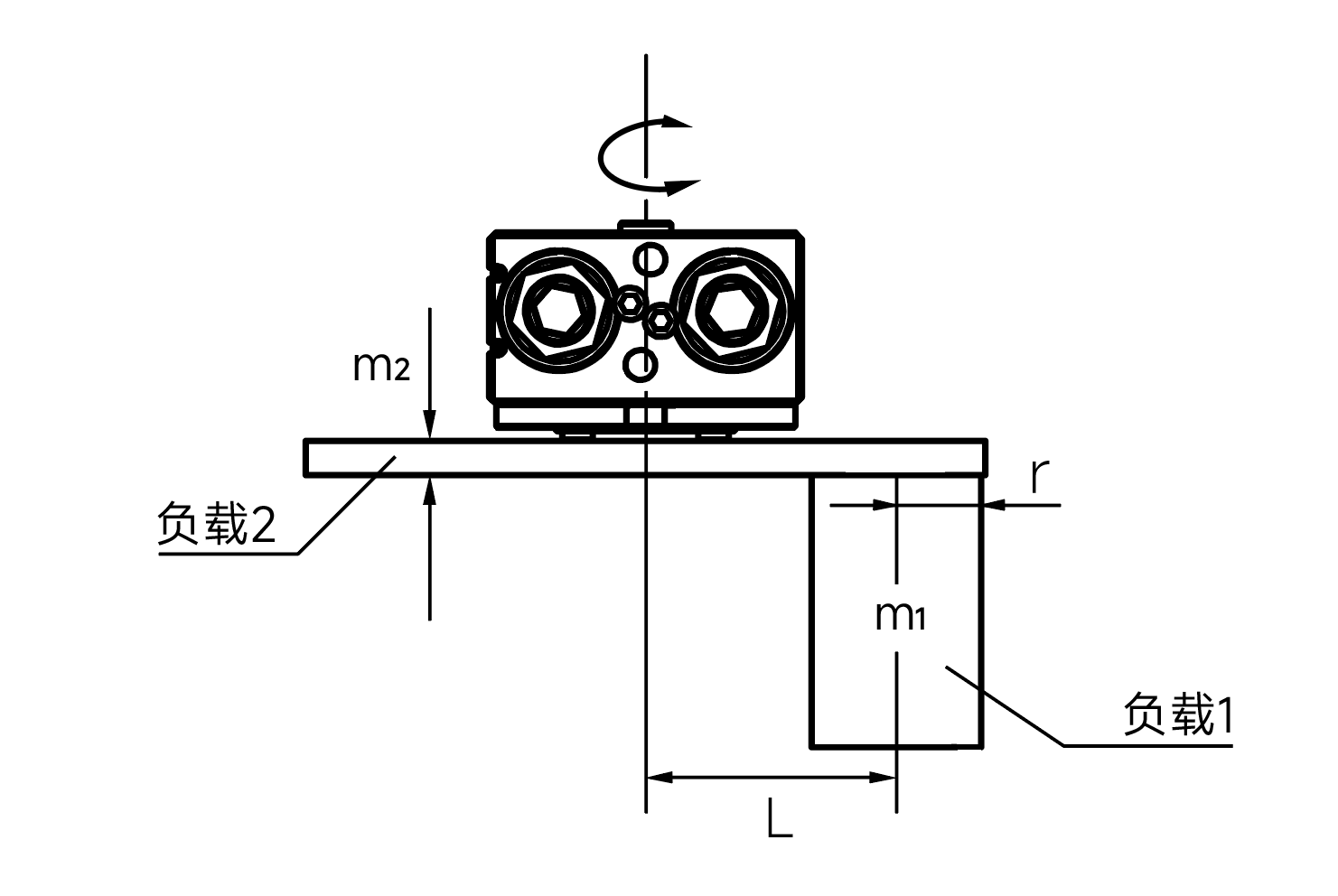
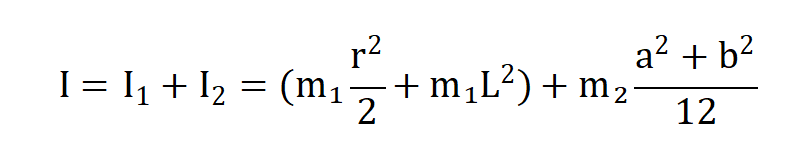
I=I₁+I₂
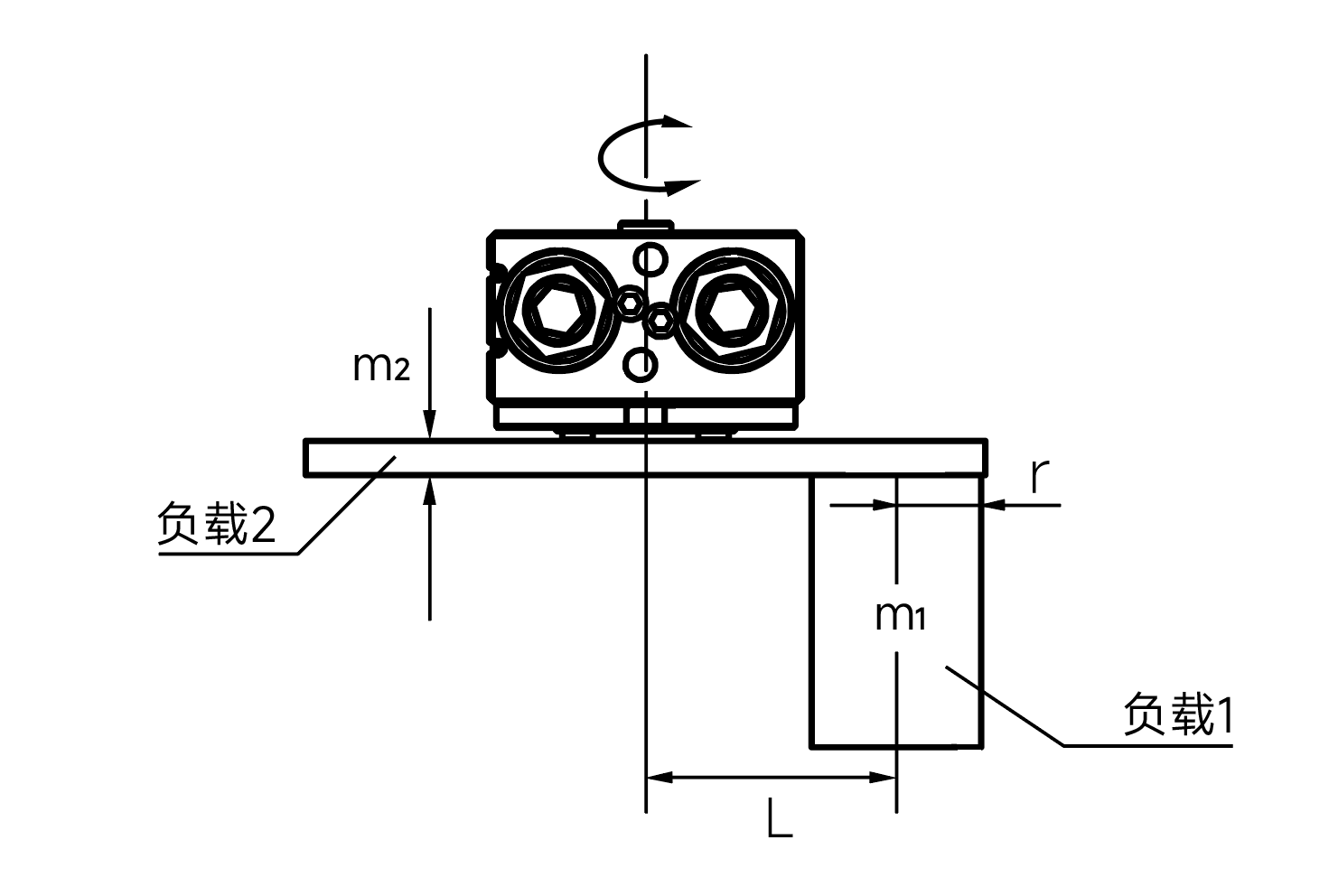
示例:
若负载1为圆柱,r为圆柱半径,负载2为长方体,a为长,b为宽,求出实际的转动惯量I。
注释:I为转动惯量(kg.m²)
-2.2角加速度α计算-
转动角度θ=90°=π/2;θ=180°=π,
转动时间为t,则角加速度α为α=2θ/t²。
注释:θ:转动角度(rad);t:转动时间(s);α:角加速度(rad/s²)
三.确定负载类型需求力矩
-3.1确定负载类型,计算回转所需必要力矩-
3.1.1惯性负载
具有惯性的负载回转的场合
示例:
水平安装,重心在回转中心线
竖直安装,重心在回转中心线
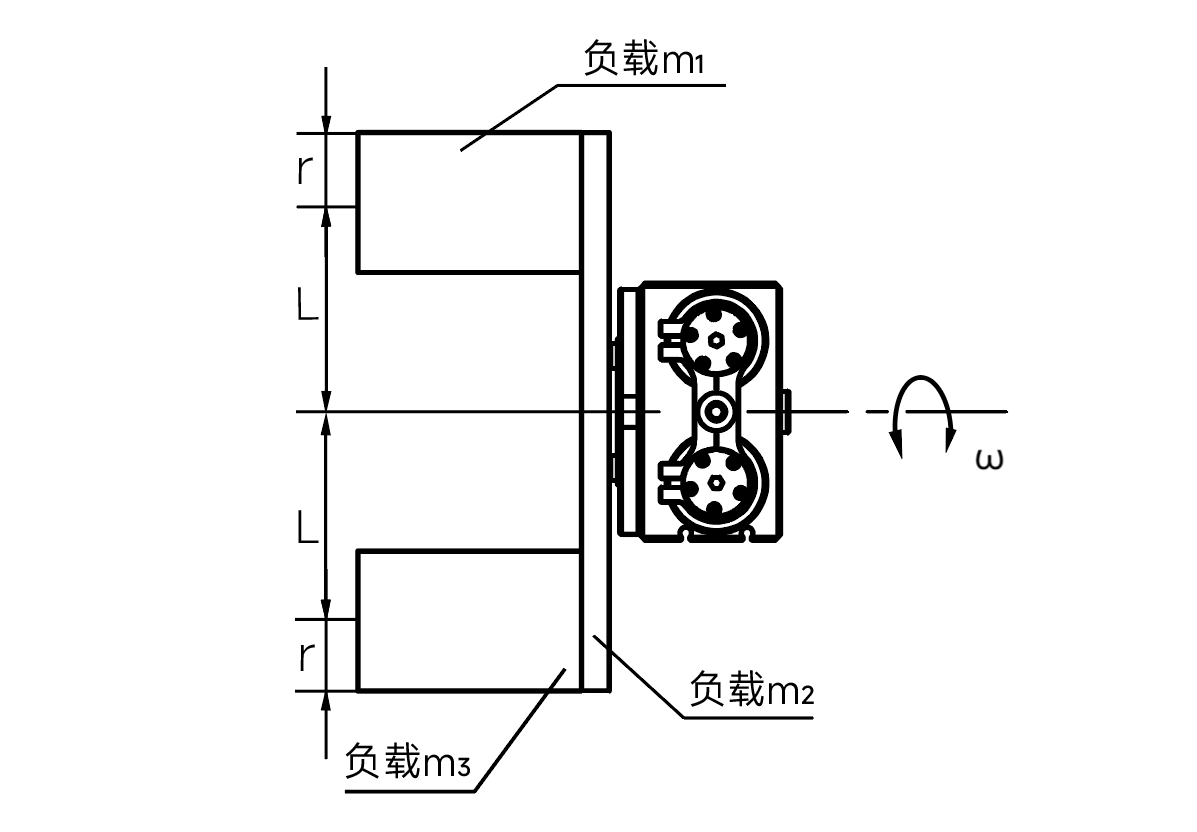
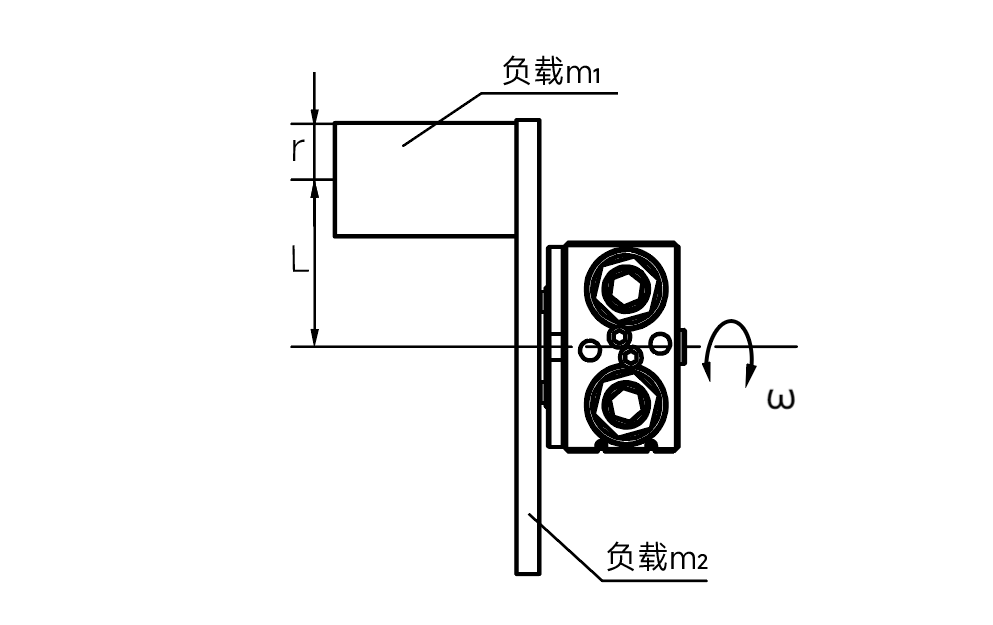
竖直安装,重心不在回转中心线
惯性负载计算
所需力矩:
T=K×Ta
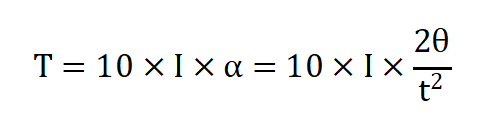
注释:Ta为惯性负载,K为安全系数,取值为10;I为转动惯量(kg·m²),α为角加速度(rad/s²);θ为转动角度(rad);t为转动时间(s)。
3.1.2阻性负载
重力或摩擦力作用于回转方向的场合。
示例:
水平安装,重心不在回转中心线。
阻性负载计算
所需力矩:
T=(3~5)×Tf=(3~5)×m×g×L
注释:Tf为阻性负载,m为负载重量kg,g为重力加速度kg/s²,L为偏心距m。
3.1.3组合负载计算
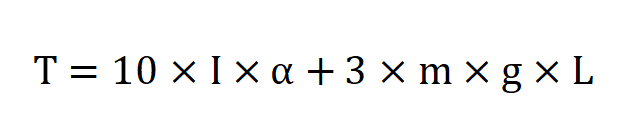
根据公式计算负载回转所需必要力矩T(N·m),所需力矩T为阻性负载Tf和惯性负载Ta的总和:
T=10×Ta+(3~5)×Tf
注释:由于要调整速度,Ta,Tf需要有余量。
-3.2对比需求力矩与TP输出力矩T₀-

根据计算结果对比参数,确定满足需求的型号。
四.核算许用动能,产品负载
-4.1核算许用动能-
4.1.1计算产品转动动能
根据计算公式:
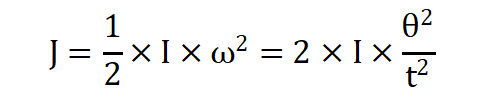
其中: I为负载的转动惯量(kg·m²),ω为角速度(rad/s),θ为转动角度(rad),t为转动时间(s)。
4.1.2对比产品许用动能
根据计算结果,对比产品许用动能,进一步确认满足功能要求的型号。

-4.2核算产品负载-
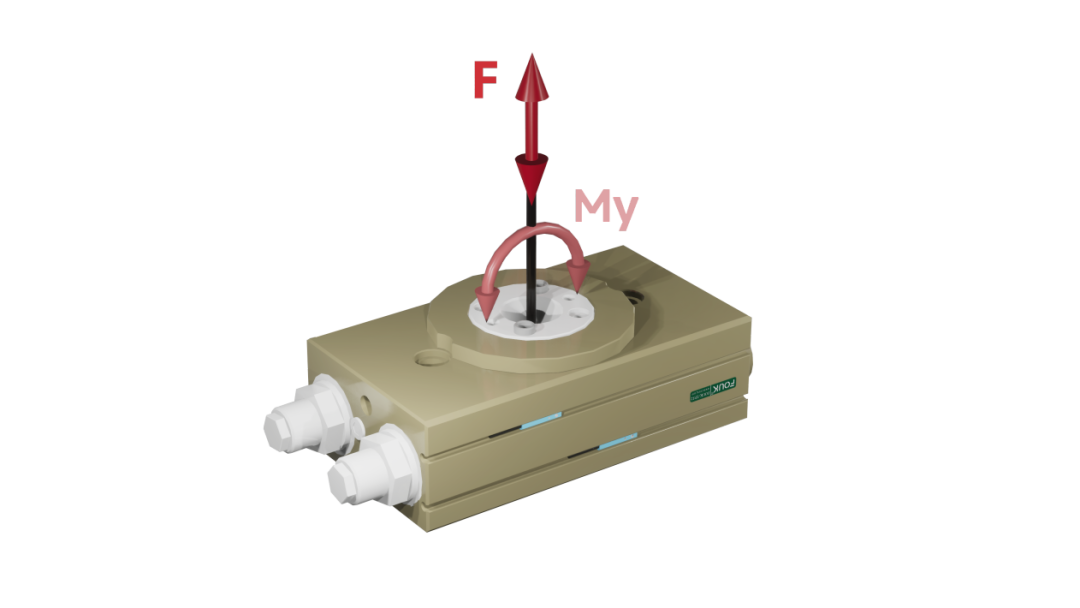
根据计算结果对比产品参数,确认满足负载要求的型号。

五.确定产品型号
根据以上选型步骤以及计算,最终确认TP型号。

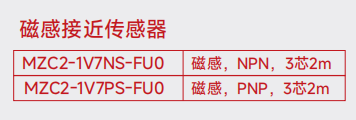
最后确定选用传感器型号以及数量,详情介绍查看样册传感器介绍页。